2016-11-17
有關 Solvespace 機構模擬功能介紹, 與 Python3 及 Brython 程式驗證
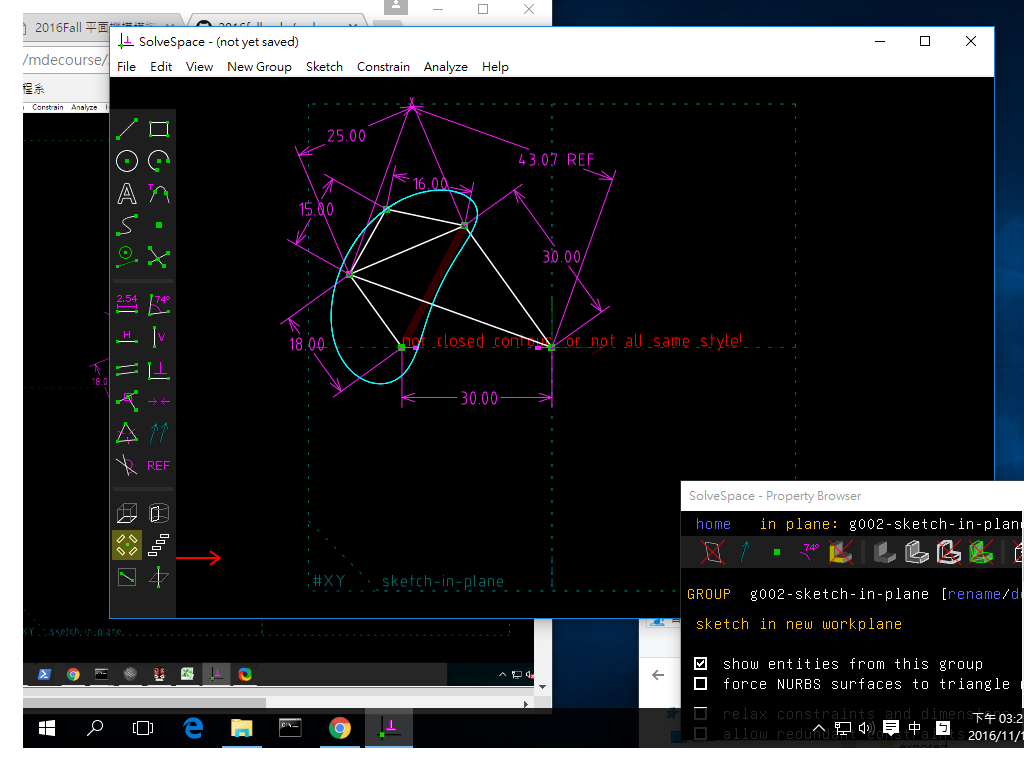
Solvespace 平面四連桿機構模擬
直接利用 Solvespace Analyze-Trace Point-Stop Trace 得到下列繞行路徑:
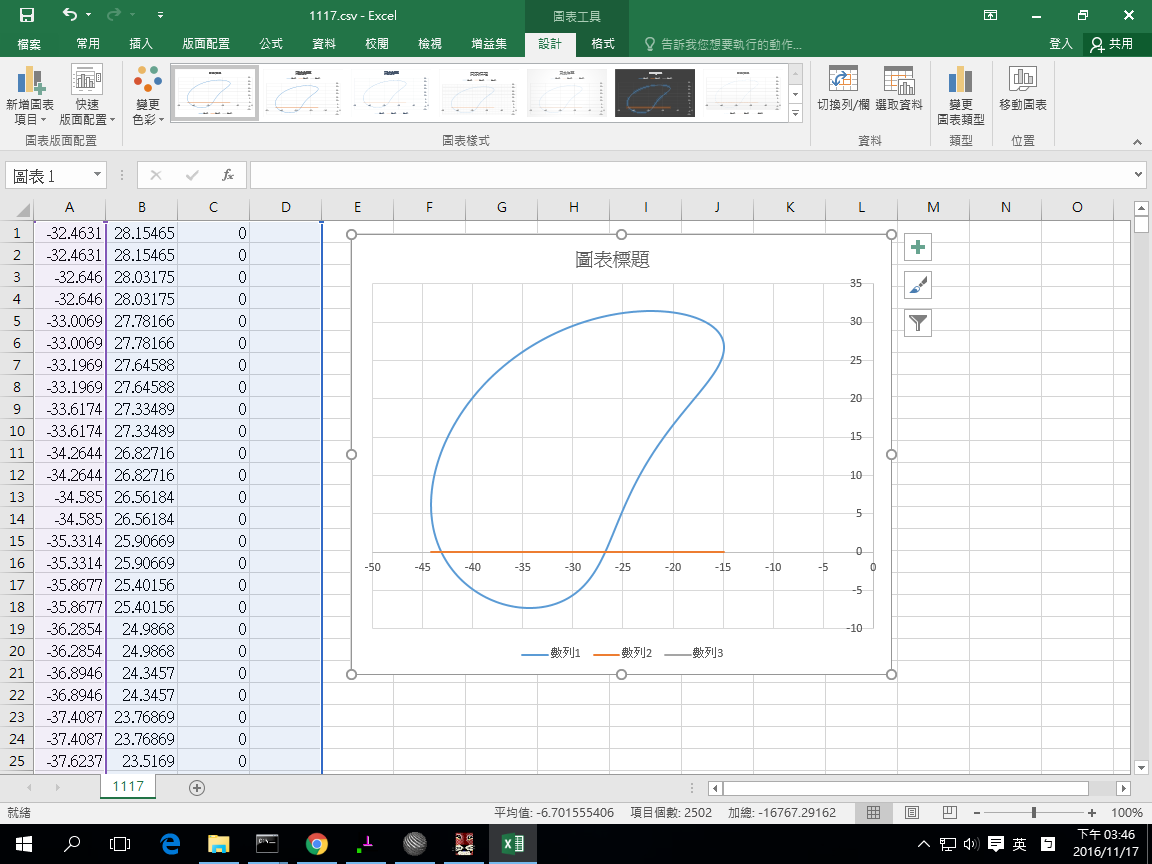
根據下圖, 試驗證 Solvespace 機構模擬的資料之正確性.
將所得到的點座標 .csv 以 Excel 畫圖, 得到:
2016-11-24
Solvespace
1. Parts (零件繪製)
範例檔案: http://solvespace.com/bracket.pl
Extrude (平行長出或除料)
Lathe (旋轉繞行長出或除料)
Export Triangle Mesh
STL 格式
three.js
2. Assembly (零件組立)
3. Linkages (fourbar & multilink) (四連桿與多連桿運動模擬)
4. Compiled & API (編譯與延伸應用)
使用 Virtualbox 虛擬主機執行 Windows 64 位元與 Ubuntu 64 位元環境中的編譯與延伸應用.
Virtualbox Ubuntu 64位元虛擬檔案: http://140.130.17.17/public/Ubuntu/1604_solvespace_final/Ubuntu_160464.vdi (只有在區網可以下載)
在虛擬主機中完成 Solvespace 編譯與執行的參考畫面:
2016-12-1
Solvespace
1. Solvespace 組合圖
2016-12-22 ## 3D列印
支柱
連接桿
底盤
圓盤
2016 11 09 20 05 42 998 from 40423106 on Vimeo.
2016 11 09 20 04 08 141 from 40423106 on Vimeo.
錄製_2016_10_05_20_31_24_791 from 40423106 on Vimeo.